In general, the channel is itself can add noise. This means that the channel itself serves as an additional layer of uncertainty to our transmissions. Consider a channel with input symbols  , and output symbols
, and output symbols  . Note that the input and output alphabets do not need to have the same number of symbols. Given the noise in the channel, if we observe the output symbol
. Note that the input and output alphabets do not need to have the same number of symbols. Given the noise in the channel, if we observe the output symbol  , we are not sure which
, we are not sure which  was the input symbol. We can then characterize the channel as a set of probabilities
was the input symbol. We can then characterize the channel as a set of probabilities  . Let us consider the information we get from observing a symbol .
. Let us consider the information we get from observing a symbol .
Definition

Figure 1: A noisy channel.
Given a probability model of the source, we have an a priori estimate  that symbol will be sent next. Upon observing , we can revise our estimate to
that symbol will be sent next. Upon observing , we can revise our estimate to  , as shown in Fig. 1. The change in information, or mutual information, is given by:
, as shown in Fig. 1. The change in information, or mutual information, is given by:
-
 |
|
(1)
|
Let's look at a few properties of mutual information. Expressing the equation above in terms of  :
:
-
 |
|
(2)
|
Thus, we can say:
-
 |
|
(3)
|
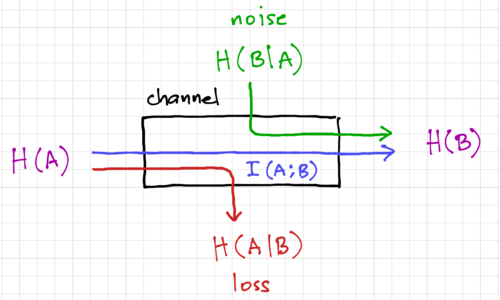
Figure 2: An information channel.
This is expected since, after observing , the amount of uncertainty is reduced, i.e. we know a bit more about , and the most change in information we can get is when and are perfectly correlated, with  . Thus, we can think of mutual information as the average information conveyed across the channel, as shown in Fig. 2. From Bayes' Theorem, we have the property:
. Thus, we can think of mutual information as the average information conveyed across the channel, as shown in Fig. 2. From Bayes' Theorem, we have the property:
-
 |
|
(4)
|
Note that if and are independent, where  and
and  , then:
, then:
-
 |
|
(5)
|
We can get the average mutual information over all the input symbols as:
-
 |
|
(6)
|
Similarly, for all the output symbols:
-
 |
|
(7)
|
For both input and output symbols, we get:
-
 |
|
(8)
|
Non-Negativity of Mutual Information
To show the non-negativity of mutual information, let us use Jensen's Inequality, which states that for a convex function,  :
:
-
 |
|
(9)
|
Using the fact that  is convex, and applying this to our expression for mutual information, we get:
is convex, and applying this to our expression for mutual information, we get:
-
 |
|
(10)
|
Note that  when
when  and
and  are independent.
are independent.
Conditional and Joint Entropy
Given and , and their entropies:
-
 |
|
(11)
|
-
 |
|
(12)
|
Conditional Entropy
The conditional entropy is a measure of the average uncertainty about when is known, and we can define it as:
-
 |
|
(13)
|
And similarly,
-
 |
|
(14)
|
Joint Entropy
If we extend the definition of entropy to two (or more) random variables, and , we can define the joint entropy of and as:
-
 |
|
(15)
|
Expanding expression for joint entropy, and using  we get:
we get:
-
 |
|
(16)
|
If we instead used  , we would get the alternative expression:
, we would get the alternative expression:
-
 |
|
(17)
|
We can then expand our expression for  as:
as:
-
 |
|
(18)
|
Sources
- Tom Carter's notes on Information Theory
- Dan Hirschberg's notes on Data Compression
References

